Mobile Manipulator – KUKA YouBot Capstone
Skills: Python, Motion Planning, Robot Kinematics, Task-Space Control, Joint Limits, Mobile Manipulation, Feedback Control, CoppeliaSim Simulation
Project Overview
This capstone project implements motion planning and kinematic task-space feedback control of a KUKA YouBot mobile manipulator. The goal was to autonomously complete a pick-and-place task using a 5-DOF arm and mecanum wheels, simulated in CoppeliaSim.
Key features include:
- Trajectory generation for end-effector pick-and-place tasks.
- PI feedback control in task space for minimizing twist error.
- Joint limit enforcement to prevent self-collisions and ensure feasible configurations.
- Integration of wheel odometry with arm kinematics for mobile manipulation.
Trajectory Generator
The reference trajectory is defined by 8 via points for the pick-and-place task, including standoff positions, cube approach, and gripper operations. Using Modern Robotics Cartesian_Trajectory, the end-effector path is interpolated in SE(3) coordinates.
Pseudocode:
- Def Trajectory_Generator()
- Unpack via points
- For each via point: compute move time and generate Cartesian trajectory
- Save trajectory with gripper states to CSV
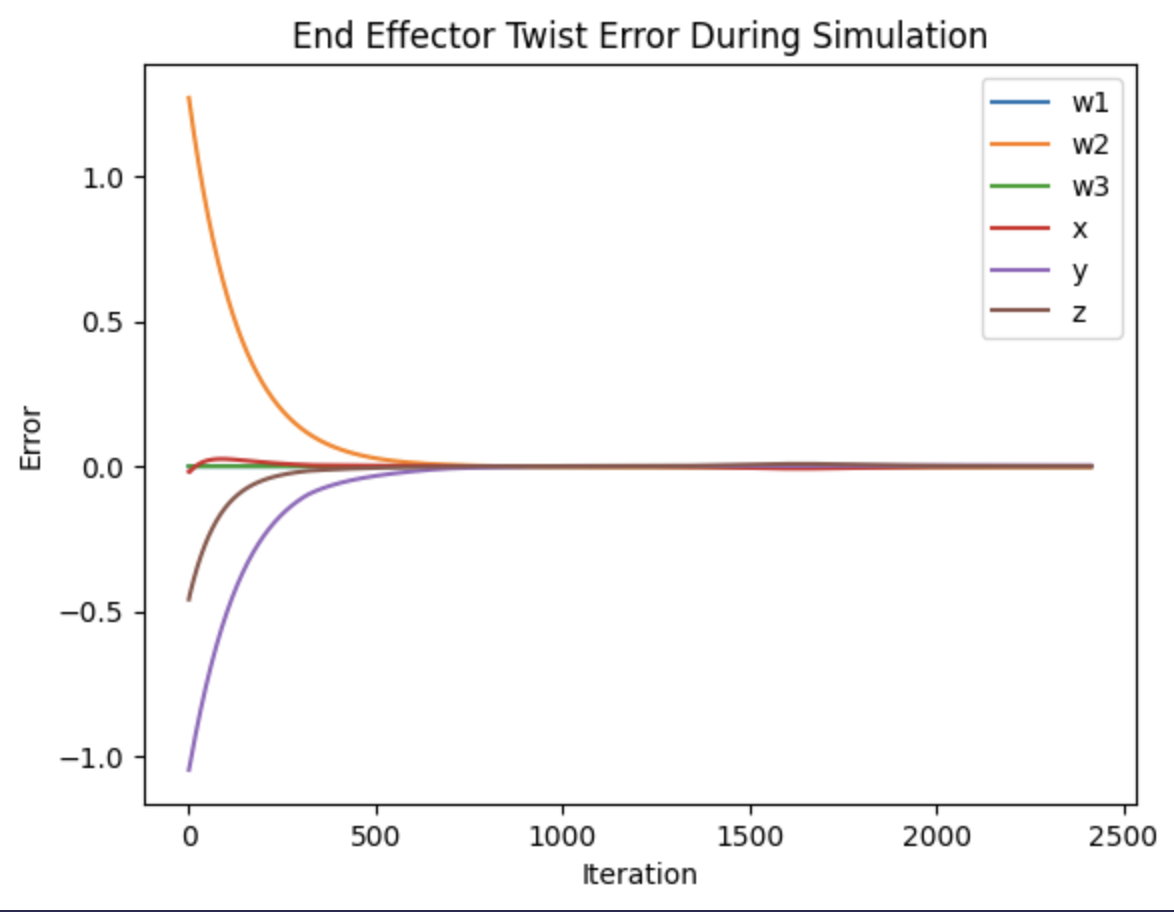
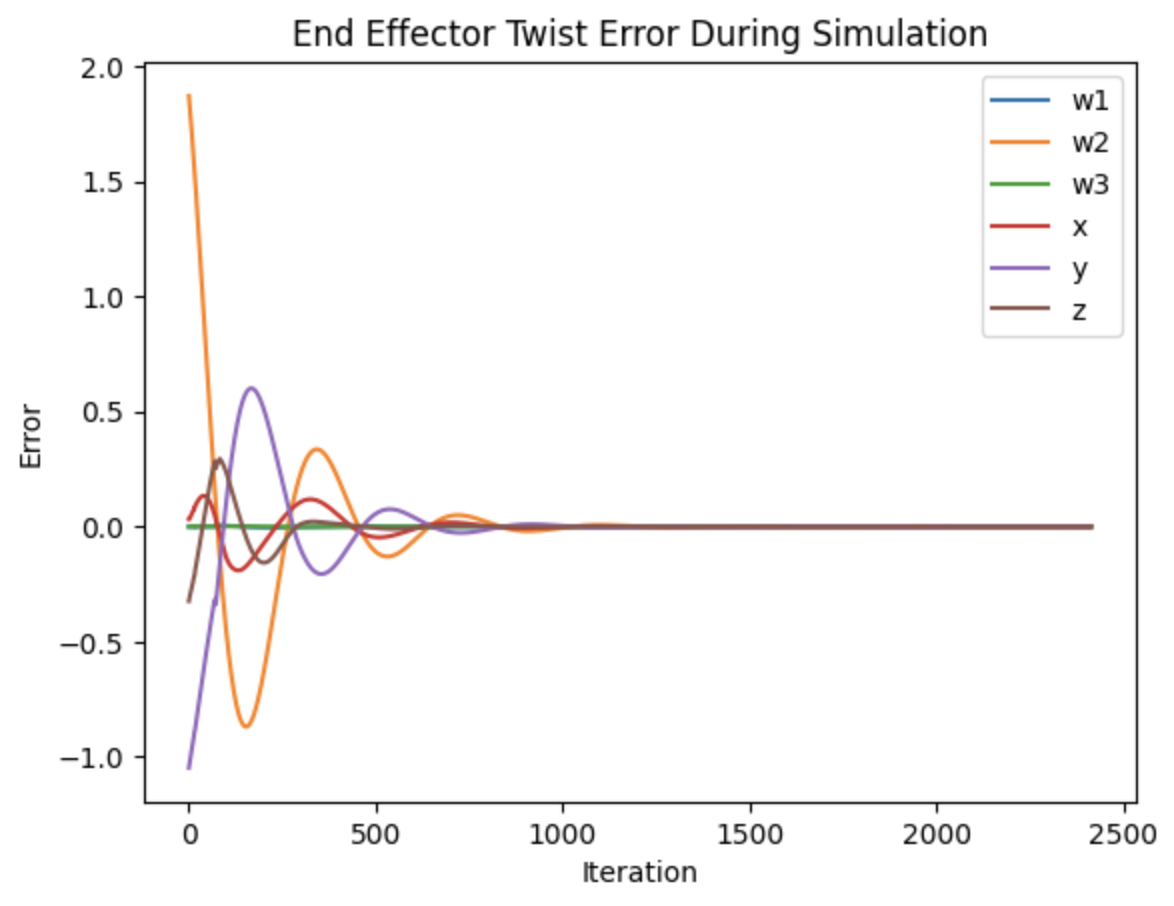
Feedback Controller
The mobile manipulator is controlled with task-space PI feedback with feed-forward control. Twist error X_err is calculated between the desired and current end-effector configurations, and used to generate an optimal twist response to minimize this error:

Joint speeds are computed using a concatenated Jacobian of wheels (J_base) and arm (J_arm), with pseudoinverse to solve for least-squares optimal joint velocities.
Joint Limits
Joint limits prevent self-collision and infeasible configurations. Violations are detected during the FeedbackControl step, and offending joints are excluded from the pseudoinverse calculation. This ensures the robot maintains a physically achievable trajectory while completing the task.